
�������ʰ�LED����һ���뵼���Դ�����ڷ����Ը��ء���������Χ��ȷ�������为�����ԣ����ͨ����ѹ������������Ч�ؿ���LED�ķ������ԡ������ص�ѹ��С�����Ϳ���������ܴ�ı仯���Ӷ�ʹ���ȷ����ϴ�仯��������ص�ѹ������������ܽ�LED�ջ���
��������
�������ʰ�LED����һ���뵼���Դ�����ڷ����Ը��ء���������Χ��ȷ�������为�����ԣ����ͨ����ѹ������������Ч�ؿ���LED�ķ������ԡ������ص�ѹ��С�����Ϳ���������ܴ�ı仯���Ӷ�ʹ���ȷ����ϴ�仯��������ص�ѹ������������ܽ�LED�ջ���LED���ص�����LED�ķ������ȡ�ɫ�¡�Ч�ʡ���ͨ���Լ�ʹ������������ء���ˣ���������LEDͨ�������ú���Դ��������Ȼ���ʰ�LED�ķ�Ч�ʱȽϸߣ�������Ч�ʲ���ȡ����LED������Ҳ��������·�йأ������Ƶ����Ϳ���ת����������LEDӦ�õĸ߹��ʼ���Ч��Ҫ�����������������
����2 LED�����������˼��
�������ڸ���������Ҫ�����������������Դ��Ҫ�����أ������Ҫһ��DC/DCת������ȷ����LED�ĺ㶨�������������LED��ǿ��һ���Ժ���ɫ�������ԡ�����ϵͳ��LED����������ʽ�仯��Χ�ϴ���������ҲӦ���ڲ�ͬ��Ӧ����Ҫ��������صı���ѹΪ12 V����ص�ѹ�ڵ����Ĺ�ʱ���ܽ���8 V��������������ʱ�������������ܽ����ѹ����14 V������������ص�ѹ�ı仯��Χ�ܿ�����Ҫ��������ѹ�Ϳ��ܸ��ڻ���������ѹ����LED��������Ҫ������һ��ѹ�ĵ�·�ṹ����Ӧ����LED�ĺ���Ҫ��
��������LED��������Ϊ��������ϵͳ�ı����ص㣬ѡ��ͨ�ÿ��ص�ԴоƬMC33167Ϊ����������������7.5��40 V��ѹֱ�����磬оƬ�ڲ����ع�ͨ���������ɴ�5 A������ͨ�����ú��ʵ���Χ��·�Ϳ�ʵ����-��ѹ���ܣ���˸�оƬ��ȫ����Ϊ������LED�������ĺ���оƬ��
����3 ���ص�Դ����оƬ�ķ����о�
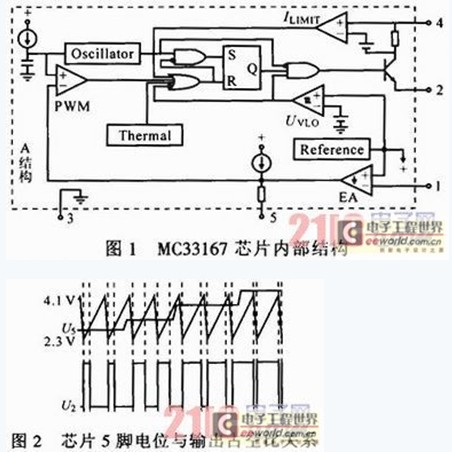
����LED���������������Ŀ��ص�ԴоƬ����MC33167����оƬ���ṩ���ֹ��ܣ����ڲ��ṹ��ͼ1��ʾ���糬��5 A��������ص�����������ӵ��輴���ṩ5 V��������ڲ�2%���ȵĻ�Դ�����ṩǷ��ѹ�������ڲ��ȱ��������ֱ���ģʽ��ʹ��·�����ڰ�ȫ״̬�¡��ڱ���ģʽ�ɽ���Դ��������36��A�����оƬ�Ĺ��ġ�����72 kHz�̶�Ƶ�ʵ���������ʹ���ص�Դ����ϸ�Ƶ�ʵ�PWM�������оƬ�ⲿʹ�ý�С�ĵ�е��ݾͿ�ʵ���˲����ã��������ⲿԪ����
����оƬ5�ŵ�λU5�������λU2��Ӧ��ϵ��ͼ2��ʾ��оƬ1�ŵ�λU1�仯ʱ(U1�����ѹ5.05 V�����ʱ)��U5����Ӧ�ɱ����仯��U5�뾧������ľ�ݲ�����PWM����Ŵ����ıȽϣ�����ߵ�ƽ��͵�ƽ��Ȼ���ڲ�����·������ƿ��عܵĵ�ͨ��ضϣ��Ӷ�����U2���������U5�ı仯��������عܵĿ���ʱ��Ҳ�Ͳ�ͬ����U2��ռ���ȷ����仯���Ӷ����������ѹ�Ĵ�С����U1����ʱ��U5���ߣ�ͬʱ����U2��ռ�ձ����ߣ�ƽ��ֵ���ӣ���������U1�����U2�ɷ��ȱ仯�������оƬ�ⲿ���Ӹ�������·�Ϳ����γ��ȶ��ĵ�Դ��
����4 LED��������·����
����4.1 �ӵ�ѹԴ������Դ�Ľṹ���
������ѹԴ��·�У��������ѹ��ȻΪU1=5 V������ԴоƬ�ڲ��Ļ���ѹ�������·���ȶ�������ʵ�ʵ�·�IJ��ԣ���������ʾ��·�������������Ի���ȶ��������ѹUo=5 V���ɵ�ѹԴ�ɽ�һ���ı�оƬ�ⲿ�ķ�����ʽ��ʹ֮��Ϊ�����������Ӷ���Ƶ���Դ��

��������Դ��·��ͼ3��ʾ��ͨ���ⲿ���ӵ�ѹUc����������������ɵ���ԭ����֪��

����ILΪ���ص�������ȡR4=R5��R6=R7��Uref=5 V����Ƭ������Ŀ��Ƶ�ѹUcΪ0��5 V��ƫ�õ�ѹUpΪ5 V����Uc=0ʱ��IL=0;��Uc=5 Vʱ��IL=1 A����������Rc=0.25 �����ɵã�IL=0.2Uc�����ͨ����������Uc�Ĵ�С���������Կ������������ֵ��
����4.2 LED�������ıջ��ȶ��Է���
������������֪����������ϵͳ�����ֵĴ��ݺ�������PWM�����LC�˲���ʱ�����Եõ���������ƽṹ��ͼ4��ʾ��

�����ۺϿ���LED����������;�������ʱ����ϵͳ��Ҫ����ϵͳ�ȶ��ԺͿ��ƾ��ȣ�ͬʱ��������Ҫ���������������űȽϴ��ҵ����ٶȲ���ܿ죬���ϵͳ��������Ҫ�ܴ�ȡ�˲����200��H������20��F����ʱ�˲���г��Ƶ�ʦ�n=15.8 krad��s-1������������Ƶ�ʦ�=452 krad��s-1����������Ʋ�˥��Լ818������ȫ�����˲�Ҫ��;ʵ���е��輰��ԴоƬ����֮��Rin=0.1�������ص���10��������ϵ����=0.4 73���˴�ѡ���С�Ħ�Ҳ�������˳��Ʋ�;������������0.1 �����ͺ�У����·��R2=100 ����R3=10 k����C3=1��F������ת��Ƶ�ʦ�1=100 rad ��s-1����2=10 krad��s-1�������Ч�ؽ���ϵͳ��Ƶ���棬���������˦ζ�ϵͳ�ȶ��Ե�Ӱ��;ͬʱ������PI��������Rf=2 000����Cf=1��F�������ת��Ƶ�ʦ�0=500 rad��s-1�������ͺ�У������ת��Ƶ�ʦ�1=100 rad��s-1��ϵͳ����Ƶ�ʦ�c=1150 rad��s-1֮�䣬���ʹ����ϵͳ��Ƶ������-20 dB/dec����0 dB��.�����ϵͳ���ȶ��ԡ�

�����˲�������Rin=0.1 ��ʱ�����ص���R=10 ����L=190��H��C=20��Fʱϵͳ��������ͼ��ͼ5��ʾ������ͼ5aΪϵͳ�����ͺ�У������ʱ�IJ���ͼ��ͼ5bΪ�ͺ�У����IJ���ͼ����ͼ��֪�������ͺ�У��ϵͳ���ȶ��������ԣ�ȱȽϴ�
����4.3 LED��������·���
������������Դ��·�Կ��ص�ԴоƬMC33167Ϊ���ģ��乤��ԭ��ͼ��ͼ6��ʾ��

�������ȿ��ǵ�ѹԴ��ͨ����ѹԴ��ʵ���·����˽��Դ�Ĺ���ԭ����Ȼ����Ƶó���ѹԴ��ͨ����ѹԴ��ʵ���·����˽��Դ�Ĺ���ԭ����Ȼ������ⲿ�������������ⲿ�������Ƶ�·�����ڵ�Ƭ���������ѹ��ΧΪ0��5 V����˿��Ƶ�·��Ӧ�������Ƶ�ѹ�뵥Ƭ�������ѹ��ƥ���·�����������ܿ���ģ���·�Ե�Ƭ��PIC18F258Ϊ���ģ�������16λ������RISC CPU������1536�ֽ�RAM��32 k FLASH��Ƭ�ں���A/D��EEPROM�洢��������PWM������ܣ���������Ӳ��ʵ�ֵ�USART��CAN���нӿڡ���Ƭ������ģ���·����Χ�����е�Դ����λ�������Լ�����PWM�źŵĵ�ѹ�����485-Canͨ�Žӿ��շ����ȵ�·��
����4.4 ���Խ������
������������Ϊ0.25�������ı���Ƶ�ѹʱ���������Ӧ����Ӧ�����Ա仯������IL=0.2Uc��ͨ��ʵ���õĿ��Ƶ�ѹ����������Ķ�Ӧ������ͼ7��ʾ��ʵ�ʶ�Ӧ��ϵΪ��IL=0.167Uc+0.043����ʵ������֪ʵ�ʵĿ��Ƶ�ѹ�����������Ӧ��ϵ�����ƻ�����ͬ�����ǵ���·��ʵ�ʵ�·�����Լ�ƫ���ѹ������˸ý����ȫ������

����5 ����
���������������Ļ��ڿ��ص���оƬMC331647��LED���������ɹ�ʵ�ֹ����ĸ��ص�ѹ���ڽϿ��ķ�Χ�ڱ仯�������ܴ����ʽϴ�ĸ��أ��������ܿ���ģ�飬ʵʱ��ȷ�ؿ���LED����ǿ�ȣ����Գ�����������̬����ָ�꣬�����ڳ���LED���ƹ�ļ�ֵ��




�й�����������Ƶ��������ҵ����������������������Ҫ����м����ԡ��ɶ��ԡ���ӭ�о�������ԺУ����ҵ����Ͷ�塣
Ͷ�����䣺edit@lightingchina.com.cn
��ϵ�绰��0086-020-85530605-5029
(Ͷ��ʱ��ע��������������λ���ʱ�͵�ַ���绰��E-mail���Ա�֪ͨ��˽�����緢����������֪ͨ�������ѯ��)
�㶫��������ý����˾ ��Ȩ���С���ֵ����ҵ��Ӫ����֤����B2-20050039����ICP��06007496��
���棺020-85548112��E-mail��Service@lightingchina.com.cn �й�������



